旋转式编码器,旋转式编码器是什么意思
旋转式编码器概要
旋转式编码器的定义
旋转式编码器,是将旋转的机械位移量转换为电气信号,对该信号进行处理后检测位置速度等的传感器。检测直线机械位移量的传感器称为线性编码器。
特长
①根据轴的旋转变位量进行输出
通过联合器与轴结合,能直接检测旋转位移量。;
②启动时无需原点复位。(仅绝对型)
绝对型的情况下,将旋转角度作为绝对数值进行并列输出。
③可对旋转方向进行检测。
增量型中可通过A相和B相的输出时间,绝对型中可通过代码的增减来掌握旋转方向。
④请根据丰富的分辨率和输出型号,选择最合适的传感器。
根据要求精度和成本、连接电路等,选择适合的传感器。
原理
|
项目分类 |
特长 |
构造 |
输出波形 |
|---|---|---|---|
|
增量型 E6A2-C E6B2-C E6C2-C E6C3-C E6D-C E6F-C E6H-C E6J-C |
本型号能根据轴的旋转位移量,输出脉冲列。 其方式是通过其他计数器,计算输出脉冲数,通过计数检测旋转量。 希望知道某输入轴位置的旋转量,先按基准位置,使计数位的计数值复位,然后再用计数器把由该位置发出的脉冲数累加起来。 因此,可任意选择基准位置,且可无限量检测旋转量。 其最大的特长是,可添加电路,产生1周期信号的2倍、4倍脉冲数,提高电流的分辨率(注)。 此外,可把每旋转一周发生的Z相信号作为1旋转内的原点使用。 注. 需要高分辨率时,一般可采用4倍增电路方式。 (如果把A相、B相的上升、下降波形分别进行微分,可得到4倍输出,分辨率则为4倍)。 |
与轴旋转同时写入光学图案的磁盘时,通过两处狭缝的光就会相应地被透过、遮断。这种光通过与各自的狭缝相对的受光元件转换为电流,通过波形整形后,成为2个矩形波输出。 另2处的狭缝要配置在与矩形波输出的相位差1/4间距处。 |
|
|
多旋转绝对型
E6C-N |
单旋转绝对型数据与通常的绝对型具有同样的特长。 旋转量数据也可作为绝对数据输出,根据旋转量数据的检测方式,选择需要或不需要电源断开时的支持电源用电池的类型。 使用增量型编码器,可适用于编码器在任意旋转状态下位置检测绝对化的场合。 |
检测部与绝对型的构成基本相同。 采用部分单旋转的绝对信号,根据内部设置的计数器,累计单旋转的1次旋转量,并作为绝对的代码,输出多旋转数据。 |
|
|
绝对型 E6CP-A E6C3-A E6F-A E6J-A |
本型号为把旋转角度通过2n的代 码作为绝对值,通过并联输出。 因此,如果持有输出代码位数的 输出量。分辨率较大时,输出量 就会增加,方式是通过直接读取 输出代码,进行旋转位置检测。 编码器一旦被装入机械,则可确 定输入旋转轴的零位,一般把零 位作为坐标原点,旋转角度用数 字输出。 此外,不会因干扰等发生数据错 落,也无需进行启动时的原点复 位。 另外,因高速旋转,不能读取符 号时,若降低转速,则可读取正 确的数据,此外因停电等切断电 源,再次接通电源的情况下,也 能读取正确的旋转数据。 |
旋转已写入图案的磁盘,透过狭缝的光就可依据图案,处于透过与遮断交替的状态。 透过的光可通过受光元件转换为电流,并进行波形整形后,变成数字信号。 |
分类
 增量式或绝对式
增量式或绝对式
考虑到容许的成本,电源接通时的原点可否恢复、控制速度、耐干扰性等,选择合适的类型。
 分解率精度的选择
分解率精度的选择
在考虑组装机械装置的要求精度和机械的成本的基础上,选择最适合的产品。一般选择机械综合精度的1/2~1/4精度的分辨率。
 外形尺寸
外形尺寸
选定时还要考虑安装空间与选定轴的形态(中空轴、杆轴类)。
 轴容许负重
轴容许负重
选定时要考虑到不同安装方法的不同轴负载状态、及机械的寿命等。

根据使用时的机械的最大旋转数来选择。
 最高响应频率数
最高响应频率数
根据组装机械装置使用时的轴最大旋转数来定。
最大响应频率=(旋转数/60)×分辨率
但是,由于实际的信号周期有所波动,所以选定时应针对上述的计算值,来选择留有余度的规格。

 轴的旋转启动转矩
轴的旋转启动转矩
驱动源的转矩为多少?

选择电路方式时应考虑到连接的后段机器、信号的频率、传送距离、干扰环境等。
长距离传送的情况下,选择线路驱动器输出。
轴旋转1次时输出的增量信号脉冲数或绝对值的绝对位置数。
增量型式的输出信号数。包括1相型(A相)、2相型(A相、B相)、3相(A相、B相、Z相)。Z相输出1次即输出1次原点用的信号。
轴旋转时,将A相、B相各信号相互间上升或下降中的时间偏移量与信号1周期时间的比,或者用电气角表示信号1周期为360°。
A相、B相用电气角表示为90°的相位差。
即顺时针旋转(Clock Wise)的方向。从轴侧面观察为向右旋转,在这个旋转方向中,通常增量型为A相比B相先进行相位输出,绝对型为代码增加方向。
CW方向反旋转时为CCW(Counter Clock Wise)
使轴以固定速旋转时输出的平均脉冲周期时间与1周期的H位时间的比。
响应信号所得到的最大信号频率。
输出脉冲的10~90%的时间。
(1)开路集电极输出
以输出电路的晶体管发射极为共通型,以集电极为开放式的输出电路。
(2)电压输出
以输出电路的晶体管的发射极为共通型,在集电极与电源间插入电阻,并输出因电压而变化的集电极的输出电路。
(3)线路驱动器输出
本输出方式采用高速、长距离输送用的专用IC方式,是依据RS422-A规格的数据传送方式。信号以差动的2信号输出,因此抗干扰能力强。接受线路驱动器输出的信号时,可使用称为线路接
(4)补码输出
输出上具备NPN和PNP2种输出晶体管的输出电路。根据输出信号的「H」、「L」,2个输出晶体管交互进行「ON」、「OFF」动作。使用时,请在正极电源、OV上进行上拉、下降后再使用。补码输出,包括输出电流的流出、流入两个动作,其特征为信号的上、下降速度快,可延长代码的长距离。可与开路集电极输入机器(NPN、PNP)连接。
旋转式编码器的轴旋转启动时必须的旋转力矩。通常旋转时,一般取比本值低的值。轴为防水用密封设计时,启动转矩的值较高。
表示旋转式编码器的旋转启动、停止时的惯性力的大小。
是加在轴上的负载负重的容许量。径向以直角方向对轴增加负重,而轴向以轴方向增加负重。两者都为轴旋转时容许负重,该负重的大小对轴承的寿命产生影响。
是满足规格的环境温度,也是接触外界温度与旋转式编码器的相关零件的温度容许值。
在断电状态下,不会引起功能劣化的环境温度,也是接触外界温度及与旋转式编码器的相关零件的温度容许值。
保护构造的标准是为了防止外部的异物侵入旋转式编码器内。根据IEC60529规格、JEM规格的规定,用IP□□表示。
(1)二进制代码
本代码为纯2进制代码,用2n表示。可通过位置的转换变换复数的位有。
(2)格雷码
转换位置时,只有1位发生变化的代码。 旋转式编码器的代码板为格雷码。
(3)余格雷码
是用格雷码表示36、360、720等2n以外的分辨率时 的代码。格雷码的性质为 :将格雷码的最上位从“0”切换至“1” 时起,当数值小的一方和数值大的一方分别只取相同区域时,在该范围内从代码的结束与开始进行转换时,只改变1位信号。根据这种性质,可按格雷码进行任意的偶数分辨率设定。 但此时,代码的起始不是从0位置开始,而是从中途的代码开始,所以实际使用时,需要进行代码转换处理,转换至由0位置起的代码后再使用。二进10进制代码(Binary Coded Decimal Code)。是分别用2进符号表示10进制各位的代码。
对应同时输出多位数据的通常并联传送,可采用由一个传送线进行系列化输出数据的形式,目的是节省连线,在接受信号侧则变换成并联信号后使用。
旋转轴为中空轴形状,通过将驱动侧的轴直接与中空孔连接,可节省轴方向的空间。
以板簧为缓冲,吸收驱动轴的振动等
编码器的旋转板(盘)是用金属制成的,与玻璃旋转板(盘)相比,更强化了耐冲击性。但受到狭缝加工的制约,不能应用于高分辨率。
编码器的安装方法之一是:用伺服装置用配件,压住编码器的法兰部后固定的方法。在临时固定的状态下,可进行编码器旋转方向的位置调节,所以适用于需要与编码器的原点相吻合的情况。
→ 第1118、1119页
|
10进制 |
二进制 |
格雷 |
格雷 余留 |
BCD | |
|---|---|---|---|---|---|
|
10 |
1 | ||||
|
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 1 1 0 0 1 0 0 0 0 1 0 1 0 0 1 1 0 0 0 1 1 1 0 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 0 1 1 0 0 0 1 1 0 1 0 1 1 1 0 0 1 1 1 1 1 0 0 0 0 1 0 0 0 1 0 1 0 0 1 0 0 1 0 0 1 1 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 1 0 0 1 0 1 1 1 0 1 1 0 0 0 0 1 1 0 0 1 0 1 1 0 1 0 0 1 1 0 1 1 0 1 1 1 0 0 0 1 1 1 0 1 0 1 1 1 1 0 0 1 1 1 1 1 1 0 0 0 0 0 1 0 0 0 0 1 1 0 0 0 1 0 1 0 0 0 1 1 1 0 0 1 0 0 1 0 0 1 0 1 1 0 0 1 1 0 1 0 0 1 1 1 1 0 1 0 0 0 1 0 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 1 1 0 1 1 0 0 1 0 1 1 0 1 1 0 1 1 1 0 1 0 1 1 1 1 1 1 0 0 0 0 1 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 1 1 1 0 1 0 0 1 1 0 1 0 1 1 1 0 1 1 0 1 1 0 1 1 1 1 1 1 0 0 0 1 1 1 0 0 1 1 1 1 0 1 0 1 1 1 0 1 1 1 1 1 1 0 0 1 1 1 1 0 1 1 1 1 1 1 0 1 1 1 1 1 1 |
0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 1 1 1 0 0 0 1 0 1 0 0 0 1 0 0 0 0 1 1 0 0 0 0 1 1 0 1 0 0 1 1 1 1 0 0 1 1 1 0 0 0 1 0 1 0 0 0 1 0 1 1 0 0 1 0 0 1 0 0 1 0 0 0 0 1 1 0 0 0 0 1 1 0 0 1 0 1 1 0 1 1 0 1 1 0 1 0 0 1 1 1 1 0 0 1 1 1 1 1 0 1 1 1 0 1 0 1 1 1 0 0 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 1 1 0 1 0 1 1 0 0 1 0 0 1 0 0 1 0 0 1 1 0 1 0 0 0 1 0 1 0 0 0 0 1 1 0 0 0 0 1 1 0 0 0 1 1 1 0 0 1 1 1 1 0 0 1 0 1 1 0 1 1 0 1 1 0 1 1 1 1 1 0 1 0 1 1 1 0 1 0 0 1 1 1 1 0 0 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 0 1 0 1 1 1 0 1 1 1 1 1 0 0 1 1 1 1 0 0 0 1 0 1 0 0 0 1 0 1 0 0 1 1 0 1 0 1 1 1 0 1 0 1 0 1 0 1 1 1 0 1 0 1 1 1 1 1 0 1 1 0 1 1 0 1 1 0 0 1 0 0 1 0 0 1 0 0 1 0 1 1 0 0 1 1 1 1 0 0 1 1 0 1 0 0 0 1 0 1 0 0 0 1 1 1 0 0 0 0 1 1 0 0 0 0 0 |
0 0 0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 9 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 2 0 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 2 9 3 0 3 1 3 2 3 3 3 4 3 5
|
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 < 0 0 1 0 0 1 0 0 1 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 1 0 0 1 0 0 1 0 0 1 0 0
1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 1 1 1 0 1 1 0 1 1 0 1 1 0 |
0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 0 0 0 0 0 0 0 1 0 0 1 0 0 1 1 1 |
特性数据的读法

|
轴承的寿命 |
导线延长特性 |
|---|---|
|
E6B2-C |
E6B2-CWZ6C
|
| 表示施加在轴上的负载与机械寿命的关系。 旋转状态的负载大小对轴承的寿命有影响。 | 表示导线延长时对输出波形的影响。 如延长导线,输出波形的上升时间将变长,输出残留电压将变高。 |
使用方法与各种数据
|
旋转 编码器 |
连接机型 |
电子计数器 |
数字转速计 |
数字旋转/ 脉冲计 |
数字回加减 运算脉冲计 |
数字计时 间隔表 |
方向判别单元 |
SYSMAC |
高速计数器 单元 |
|---|---|---|---|---|---|---|---|---|---|
型号 |
H7BR |
H7ER |
K3NR |
K3NC |
K3NP |
E63-WF5C |
CJ1M-CPU2□ |
C□-CT□ | |
|
E6D-CWZ1E |
○ 需要编码器 用的其他电源 |
○ |
× |
× |
× |
× |
× |
○ | |
|
E6D-CWZ2C |
○ |
○ |
○ |
○ |
○ |
○ |
× |
○ | |
|
E6F-CWZ5G |
○ |
○ |
○ |
○ |
○ |
○ |
○ |
○ | |
|
E6A2-CS3E E6A2-CW3E E6A2-CWZ3E E6B2-CWZ3E E6H-CWZ3E E6C2-CWZ3E E6C3-CWZ3EH |
○ |
○ |
○ |
○ |
○ |
○ |
× |
○ | |
|
E6A2-CS3C E6A2-CW3C E6A2-CWZ3C |
○ |
○ |
○ |
○ |
○ |
○ |
× |
○ | |
|
E6A2-CS5C E6A2-CW5C E6B2-CWZ6C E6H-CWZ6C E6C2-CWZ6C E6C3-CWZ5GH |
○ | ||||||||
|
E6B2-CWZ1X E6H-CWZ3X E6C2-CWZ1X E6C3-CWZ3XH |
× |
× |
× |
× |
× |
× |
○ |
○ | |
|
E6B2-CWZ5B E6C2-CWZ5B |
○ 需要外带负载连接电阻 |
× |
○ |
× |
○ |
× |
× |
× | |
|
旋转 编码器 |
连接机型 |
凸轮定位器 |
程序控制器SYSMAC | ||||||
|---|---|---|---|---|---|---|---|---|---|
型号 |
H8PS |
H8PR |
CPM1A |
CQM1H-CPU51 +CQM1H-ABB21 |
DC输出单元 | ||||
|
E6CP-AG5C E6C3-AG5C |
× |
× |
○ |
需要编码器用的 其他电源 |
○ |
需要编码器用的 其他电源 |
○ |
需要编码器用的 其他电源 | |
|
E6CP-AG5C-C E6C3-AG5C-C E6F-AG5C-C |
○ |
× |
× |
|
○ |
需要连接导线 E69-DC5 |
× |
| |
|
E6G-AB1E |
× |
× |
× |
|
× |
|
× |
| |
|
E6G-AB2C |
× |
× |
○ |
需要编码器用的 其他电源 |
× |
|
○ |
需要编码器用的 其他电源 | |
|
E6F-AB3C |
× |
× |
× |
| |||||
|
E6F-AB3C-C |
× |
○ |
× |
|
× |
|
× |
| |
|
E6C-NN5C E6C-NN5CA |
× |
× |
○ |
|
× |
|
○ |
需要编码器用的 其他电源 | |
|
E6C-NN5C-C E6C-NN5CA-C |
× |
× |
○ |
需要日本航空电子(株)制
接插件 PS-26PE-D4□ |
× |
|
○ |
需要日本航空电子(株)制
接插件 PS-26PE-D4□ | |
|
适用机型 示例 |
E6A2-CS3E 10P/R、60P/R E6C2-CWZ3E、E6F-CWZ5G 600P/R E6C3-CWZ3EH 10P/R、60P/R、600P/R |
|
适用机型 示例 |
E6A2-CW3E E6C2-CWZ3E、E6C3-CWZ3EH、 |
|
适用机型 示例 |
E6A2-CS3C、E6A2-CS5C E6A2-CW3C、E6A2-CW5C E6C2-CWZ6C、E6F-CWZ5G |
|
适用机型 示例 |
E6A2-CS3E、E6A2-CW3E E6C2-CWZ3E |
|
适用机型 |
E6A2-C、E6B2-C、E6C2-C、E6H-C E6F-CWZ5G、 E6D的开路集电极输出型 |
|
适用机型 |
E6B2-CWZ5B E6C2-CWZ5B、E6C3-CWZ5GH |
|
适用机型 |
E6B2-CWZ1X、E6C2-CWZ1X E6C3-CWZ3XH、E6H-CWZ3X |
|
适用机型 示例 |
E6A2-CWZ5C、E6C2-CWZ6C、 E6C3-CWZ5GH、E6F-CWZ5G |
〈计数模式〉
|
相位差 输入模式 |
用A相、B相的相位差(4倍固定)进行加减法计算。 |
|
加减法脉冲 输入模式 |
将A相作为加法脉冲输入、B相作为减法脉冲输入,进行加减法计算。 |
|
脉冲+方向 输入模式 |
将A相作为脉冲输入,B相作为方向信号(加法/减法)进行加减法计算。 |
|
加减法脉冲 输入模式 |
仅使用A相进行加减法计算。 |
〈数值范围模式〉
|
线性模式 |
从下限值到上限值的范围内,对输入脉冲进行计算。 |
|
环形模式 |
在设定范围内,使输入脉冲环形后进行计算。 |
〈复位方式〉
|
Z相+软件 复位 |
软件复位在ON的状态下,Z相输入为OFF→ON时,对当前值进行复位。 |
|
软件复位 |
软件复位为OFF→ON时,对当前值进行复位。 |
〈输出方式〉
|
目标值 一致比较 |
最多可设定48个目标值。当计数值与目标值一致时,实施指定子程序处理。 |
|
区域比较 |
最多可设定8个区域(上、下限值)。计数值达到区域内时,则实施指定子程序处理。 |
|
适用机型示例 |
E6B2-CWZ1X、E6C2-CWZ1X E6C3-CWZ3XH、E6H-CWZ3X 线路驱动器输入型 |
|
适用机型 示例 |
E6F-AG5C-C、E6CP-AG5C-C E6C3-AG5C-C |
可直接从绝对值(ABS)型编码器读入位置数据。ABS输入是12位的格雷码。位置数据在断电时也可存储,所以电源恢复时无需原点复位。 此外,通过原点修正功能,可将任意位置作为原点处理。
〈动作模式〉
可从BCD模式和
360模式中选择。360模式中选择。
〈分辨率〉/P>
可从8位(0~255)、10位(0~1023)、12位(0~4095)中选择。
设定时请与要连接的编码器的〈输入规格〉
|
输入电压 |
DC24V±10%/ |
输入/出点数 |
最大128点 | |
|
输入阻抗 |
5.4k Ω |
用户存储器 |
3.2K瓦 | |
|
输入电流 |
4mA(TYP.) |
数据存储器 |
1K瓦 | |
|
ON电压 |
最时 DC16.8V |
连接单元数 |
最多7单元 | |
|
OFF电压 |
最大 DC3.0V |
指令种类 |
118种 | |
|
计数速度 |
最大 4kHz |
|||
|
输入代码 |
格雷2进制 |

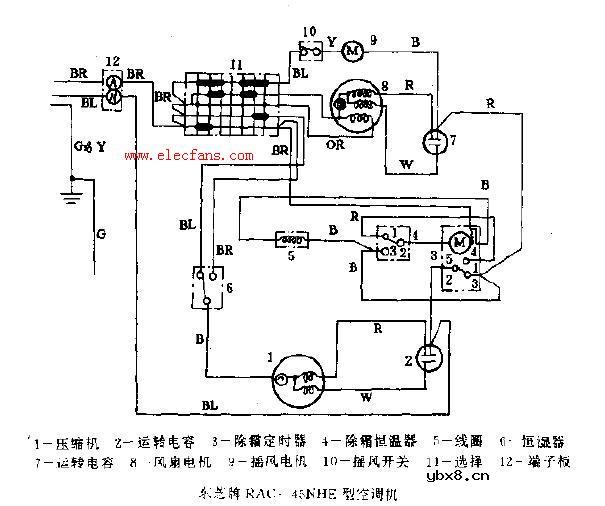 东芝牌RAC-45NHE型空调机电路图
东芝牌RAC-45NHE型空调机电路图
时间:2026-03-04
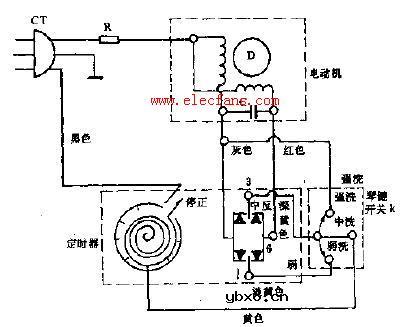 杜鹃牌XPB2-3型洗衣机电路图
杜鹃牌XPB2-3型洗衣机电路图
时间:2026-03-04
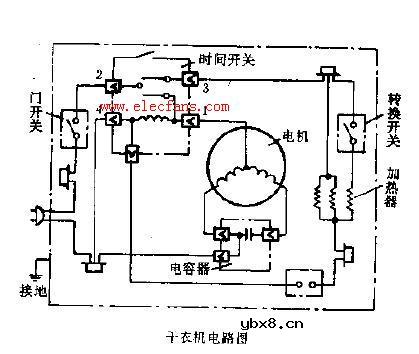 干衣机电路图
干衣机电路图
时间:2026-03-04
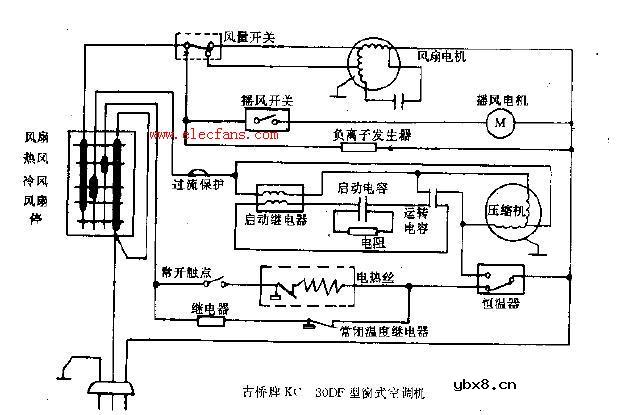 古桥牌KC-30DE型牌窗式空调机电路图
古桥牌KC-30DE型牌窗式空调机电路图
时间:2026-03-04
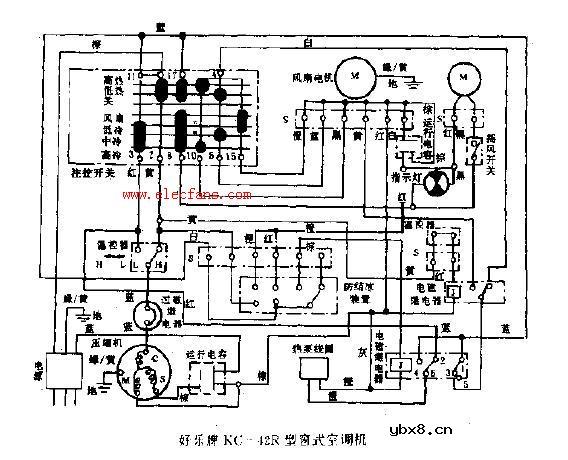 好乐牌KC-42R型窗式空调机电路图
好乐牌KC-42R型窗式空调机电路图
时间:2026-03-04
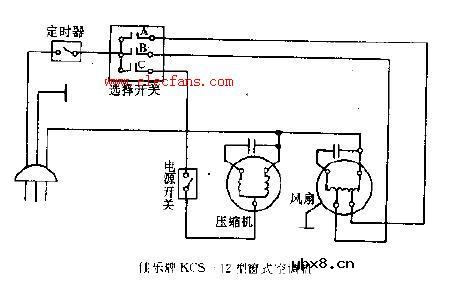 佳乐牌KCS-12型窗式空调机电路图
佳乐牌KCS-12型窗式空调机电路图
时间:2026-03-04
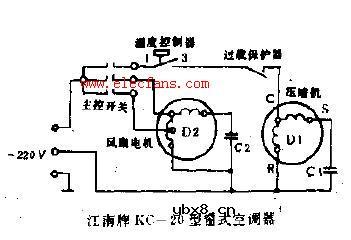 江南牌KC-20型窗式空调器电路图
江南牌KC-20型窗式空调器电路图
时间:2026-03-04
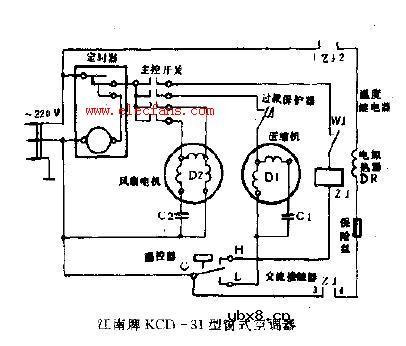 江南牌KCD-31型窗式空调器电路图
江南牌KCD-31型窗式空调器电路图
时间:2026-03-04
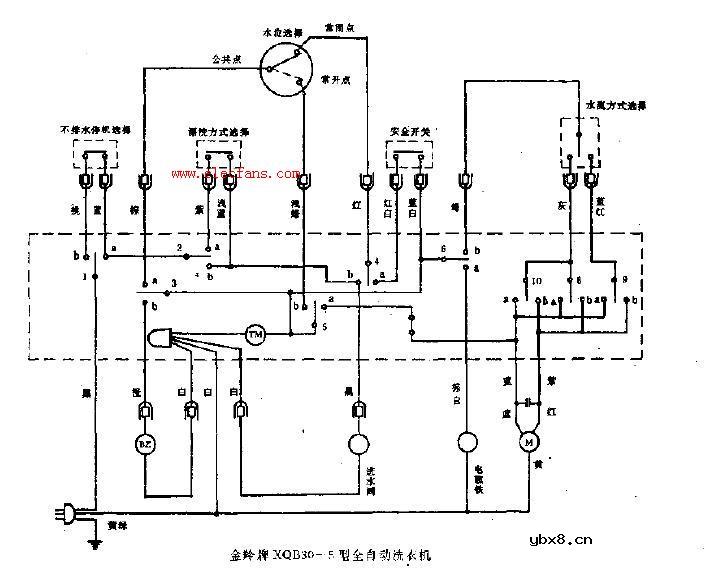 金羚牌XQB30-5型全自动洗衣机电路图
金羚牌XQB30-5型全自动洗衣机电路图
时间:2026-03-04
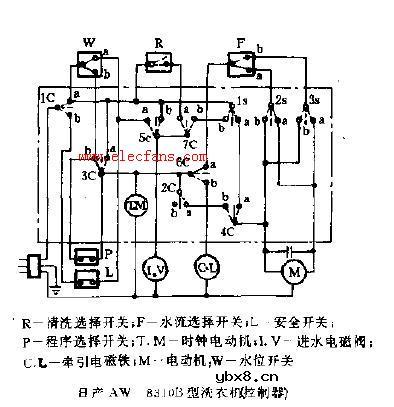 日产AW B310B型洗衣机控制器电路图
日产AW B310B型洗衣机控制器电路图
时间:2026-03-04
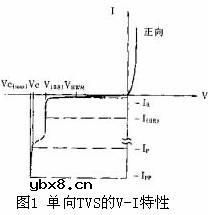 瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
时间:2026-03-04
 常用整流二极管型号大全
常用整流二极管型号大全
时间:2026-03-04
S/HS固态继电器原理简介
时间:2026-03-04
稳压二极管的选用和代换
时间:2026-03-04
TVS器件的电特性有哪些
时间:2026-03-04
TVS二极管的分类/应用,TVS二极管的特点/选用...
时间:2026-03-04
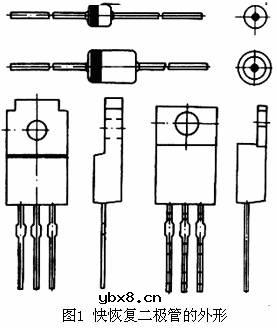 快恢复二极管,快恢复二极管是什么意思
快恢复二极管,快恢复二极管是什么意思
时间:2026-03-04
PN结温度传感器工作原理是什么?
时间:2026-03-04
双向二极管起什么作用?
时间:2026-03-04
集电极开路(OC)/漏极开路(OD)输出的结构
时间:2026-03-04